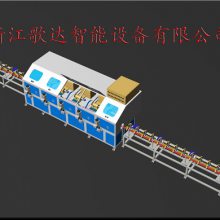
浙江歌达智能设备有限公司主要生产自动抛光机、车床机械手等产品。
下面为你分享时下工业机器人的关键技术及其应用
洁净机器人
关键技术包括:
(1)洁净润滑技术:通过采用负压抑尘结构和非挥发性润滑脂,搬运机械手厂家,实现对环境无颗粒污染,满足洁净要求。
(2)高速平稳控制技术:通过轨迹优化和提高关节伺服性能,实现洁净搬运的平稳性。
(3)控制器的小型化技术:根据洁净室建造和运营成本高,通过控制器小型化技术减小洁净机器人的占用空间。
(4)晶圆检测技术:通过光学传感器,能够通过机器人的扫描,获得卡匣中晶圆有无缺片、倾斜等信息。
选择专业,选择歌达,歌达将以无微不至的关注不负您的信赖!
浙江歌达智能设备有限公司主要生产自动抛光机、车床机械手等产品。
下面为你分享时下工业机器人的关键技术及其应用
洁净机器人
洁净机器人是一种在洁净环境中使用的工业机器人。随着生产技术水平不断提高,其对生产环境的要求也日益苛刻,冲床搬运机械手,很多现代工业产品生产都要求在洁净环境进行,洁净机器人是洁净环境下生产需要的关键设备。
选择专业,选择歌达,歌达将以无微不至的关注不负您的信赖!
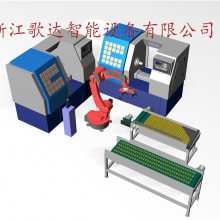
浙江歌达智能设备有限公司主要生产自动抛光机、车床机械手等产品。
下面为你分享数控机床机器人是如何使用的?
力学特性分析
一个桁架机器人是由许多定位单元组成的,每根定位系统都要分析。需要分析的项目如下:水平推力Fx 力学分析图五正压力Fz侧压力FyMx、My、Mz5、机械强度校核:每个定位单元,搬运机械手,每个梁都要进行校核,尤其双端支撑梁和悬臂梁。
1) 挠度变形计算挠度变形图六F:负载(N);L:定位单元长度(mm);E:材料弹性模量;I:材料截面惯性矩(mm4);f:挠度形变(mm)
桁架机器人在计算挠度形变时,自动搬运机械手,梁的自重产生的变形不能忽视,梁的自重按均布载荷计算。
以上公式计算的是静态形变,实际应用中,因为桁架机器人一直处于运动状态,必须计算加速力产生的形变,形变直接影响桁架机器人的运行精度。
2)扭转形变计算:
当一根梁的一端固定,另一端施加一个绕轴扭矩后,将产生扭曲变形。实际应用中产生该形变的原因一般是负载偏心或有绕轴加速旋转的物体存在。
选择专业,选择歌达,歌达将以无微不至的关注不负您的信赖!