浙江歌达智能设备有限公司主要生产自动抛光机、车床机械手等产品。
下面为你分享数控车床上下料机械手的特征
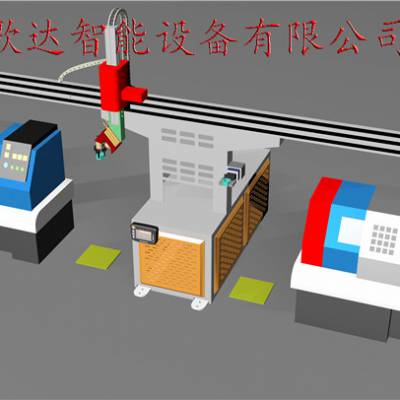
数控机床机械手是典型的机电一体化设备,可用于数控机床上工件加工,自动地为机床抓取工件,取代操作人员频繁取料,实现工件加工自动化,节约劳动力,节约生产成本,提高工作效率。在全自动化数控加工生产线中,零件的装卸传送环节一般利用工业机器人机械手完成操作,但在各种场合中都采用工业机器人不一定广泛合适。针对具体的生产工艺,结合机床的实际结构,利用数控车床上下料机械可以实现更简便更一体的零件装卸传送操作。
选择专业,选择歌达,歌达将以无微不至的关注不负您的信赖!
浙江歌达智能设备有限公司主要生产自动抛光机、车床机械手等产品。
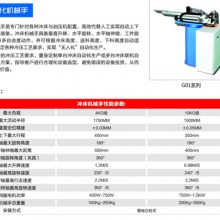
下面为你分享冲压机械手的性能及其特点
冲压机械手是在自动化设备的基础上,根据冲压生产特点,专门为实现冲压自动化无人生产而研发的设备。冲压机械手为适应柔性化的生产要求,压力机的所有控制功能应做到集成化,车床机械手,从而实现全套模具的菜单化管理,主要包括滑块行程调整、平衡器气压的调整、气垫行程调整以及自动化控制系统等各个环节的参数设定。
选择专业,选择歌达,歌达将以无微不至的关注不负您的信赖!
浙江歌达智能设备有限公司主要生产自动抛光机、车床机械手等产品。
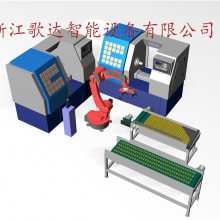
下面为你分享数控机床机器人是如何使用的?
力学特性分析
一个桁架机器人是由许多定位单元组成的,每根定位系统都要分析。需要分析的项目如下:水平推力Fx 力学分析图五正压力Fz侧压力FyMx、My、Mz5、机械强度校核:每个定位单元,车床机械手哪家好,每个梁都要进行校核,尤其双端支撑梁和悬臂梁。
1) 挠度变形计算挠度变形图六F:负载(N);L:定位单元长度(mm);E:材料弹性模量;I:材料截面惯性矩(mm4);f:挠度形变(mm)
桁架机器人在计算挠度形变时,梁的自重产生的变形不能忽视,车床机械手定制,梁的自重按均布载荷计算。
以上公式计算的是静态形变,实际应用中,因为桁架机器人一直处于运动状态,必须计算加速力产生的形变,形变直接影响桁架机器人的运行精度。
2)扭转形变计算:
当一根梁的一端固定,另一端施加一个绕轴扭矩后,将产生扭曲变形。实际应用中产生该形变的原因一般是负载偏心或有绕轴加速旋转的物体存在。
选择专业,选择歌达,歌达将以无微不至的关注不负您的信赖!